2024 9th International Conference on Robotics and Automation Engineering
Singapore | November 15-17, 2024
ICRAE 2024 IEEE Conference Proceedings (ISBN: 979-8-3315-1830-1)
IEEE Online | Ei Compendex| Scopus
{kind=link}
{kind=link}
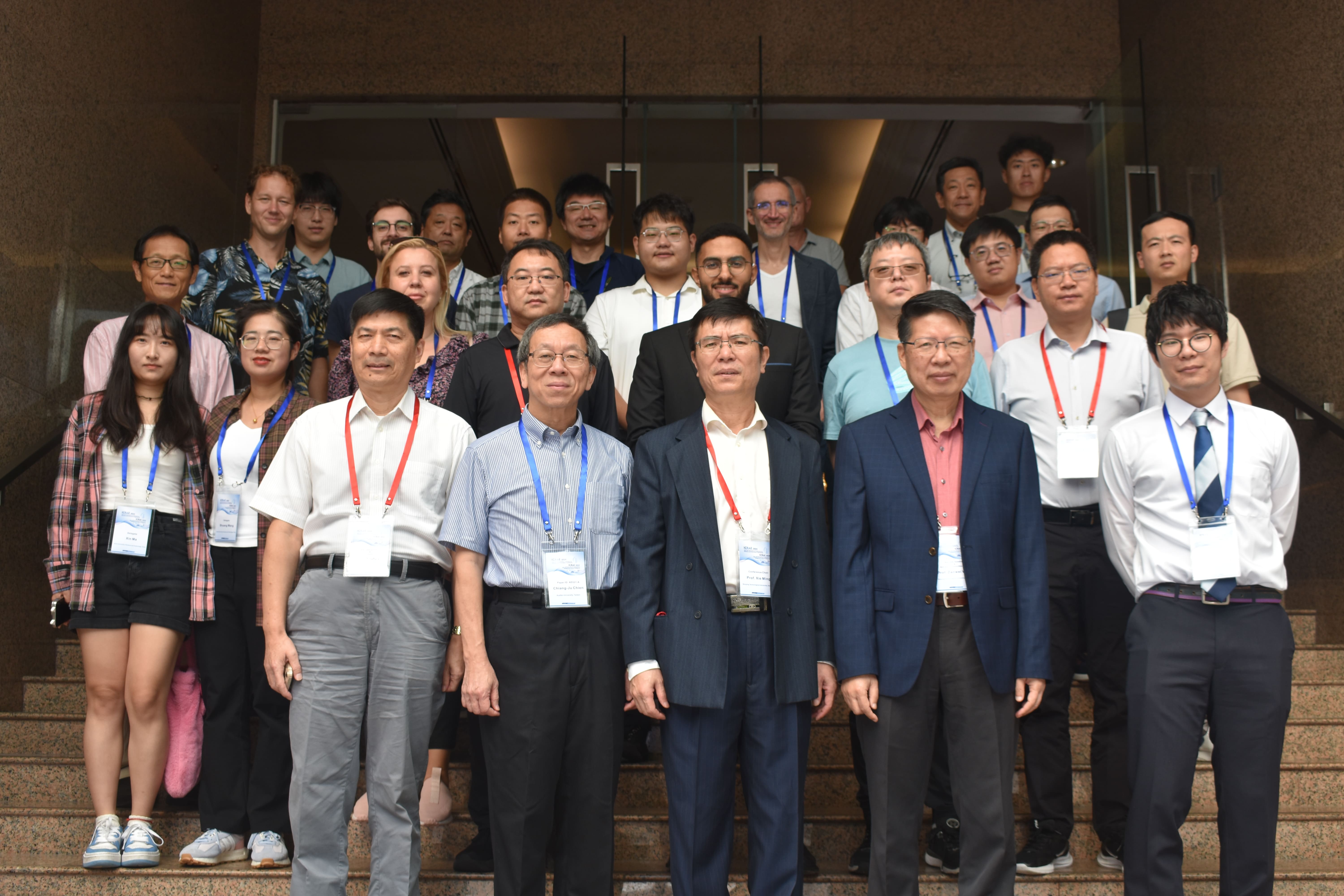











2024 9th International Conference on Robotics and Automation Engineering(ICRAE 2024) has been held successfully in Singapore on November 15-17, 2024 in hybrid virtual style. ICRAE 2024 conference is is co-sponsored by Singapore Institute of Electronics and Sensors, Systems Society of Singapore, IEEE and IEEE Robotics & Automation Society. There were around 60 participants from over 8 countries, including Singapore, USA, China, Italy, the Philippines, Malaysia, Germany, Thailand, Canada, etc. to attend the ICRAE 2024 conference.
Besides the keynote speeches, there were 9 technical sessions for authors' live and online presentations in the areas of followings:
Onsite S1: Image-based Information System and Safety Management;
Onsite S2: Mobile Robot Kinematic Analysis and Trajectory Planning;
Onsite S3: Multi-intelligent System Collaboration and Control Technology;
Online S1: Machine Learning Models and Algorithms in Intelligent Systems;
Online S2: Machine Vision and Image Processing;
Online S3: Functional Robot Design and Control;
Online S4: Intelligent Robots and Machine Vision;
Online S5: Robot Motion and Path Planning;
Online S6: Unmanned Control System and Motion Trajectory Planning;
After evaluations from session chairs, 9 best presenters were selected among all presenters. In order to encourage student authors, ICRAE 2024 added the Best student Paper Award this year. Referring to the reviewing comments from TPC member and some suggestions from conference committees, we finally selected 2 Best Student Paper Award. Congratulations to these winners.
Best Paper Award
Paper Title: The Harvesting Line Fitting for Intelligent Oolong Tea Harvesting Robot
Authors: Ruidong Yu, Yuqiong You, Zhou Fang, Yinhui Xie, Qiming Li, Zhiqin Guo, Jiyou Zhang, Jun Li
Authors: Hugo Rémin, Sébastien Lagrange, Laurent Dollé, Sébastien Lahaye
Best Oral Session Presenters
Session 1
Presenter: Hugo REMIN, Université d’Angers, France
Presentation Title: On Solving the Synchronized Dual-Arm Robotic Task Scheduling Problem
Session 2
Presenter: Ruidong Yu, Fuzhou University, China
Presentation Title: The Harvesting Line Fitting for Intelligent Oolong Tea Harvesting Robot
Session 3
Presenter: Filippo Sanfilippo, University of Agder, Norway
Presentation Title: Human-Robot Teaming: A Universal Controller with Multi-Modal Feedback for Emergency Response Robots
Online Session 1
Presenter: Dalim Wahby, Université Côte d’Azur, I3S/CNRS, France
Presentation Title: Enhanced PID Neural Network Control (EPIDNNC) - A Model Reference Approach
Online Session 2
Presenter: Nikolai Makarov, Mathematical Robotics Science Division Sirius University, Russia
Presentation Title: Particle Swarm Optimization-based Method of Source Seeking by Small Robotic Groups in the Presence of Noises and Communication Constraints
Online Session 3
Presenter: Djamel-Eddine TAHRAOUI, ENS Paris-Saclay - Université Paris-Saclay, France
Presentation Title: A Method for Minimizing Energy Consumption of Industrial Robots with Cycle Time Considerations
Online Session 5
Presenter: Eisuke Kita, Nagoya University, Japan
Presentation Title: Design of Velocity Control Model in Robot Vehicle Platoon
Online Session 6
Presenter: Faris Syed, Heriot-Watt University, UAE
Presentation Title: Advancing Autonomous Vehicle Perception: YOLO Algorithms and Custom Dataset Integration for the UAE Environment